摘要:摘要:為提高智慧農業中無線傳感器目標定位的精度���,采用改進四邊測距算法����。首先通過4個查詢節點坐標構造與信標節點坐標的線性方程�,為兼顧定位區域其他信標節點定位誤差,對
摘要:為提高智慧農業中無線傳感器目標定位的精度�����,采用改進四邊測距算法��。首先通過4個查詢節點坐標構造與信標節點坐標的線性方程��,為兼顧定位區域其他信標節點定位誤差,對信標節點的坐標誤差求均值����;隨后未知節點到信標節點的距離采用牛頓迭代求精�����;最后對鄰居位置相對不集中的節點進行排除,并且給出了算法流程����。試驗仿真顯示,在信標節點比例增加的情況下,該算法比其他算法的定位誤差下降速度快���,定位誤差與其他算法間隔比較大,而且變化幅度較小,定位性能趨于穩定��。
關鍵詞:智慧農業�;無線傳感器;精確定位;四邊測距�;迭代��;定位誤差;閾值
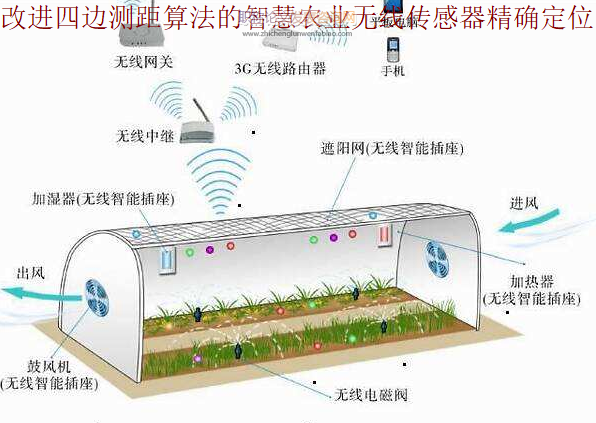
在智慧農業監測中���,使用飛行器將幾百個甚至幾千個傳感器隨機拋撒到監測區域,便于獲取環境信息�����,但是對獲取的監測信息需要附帶相應的位置信息�����,在大多數情況下��,無線傳感器隨機布放的環境不是在二維區域中,而是在復雜多變的三維區域中,傳感器節點取得的信息只有與自身位置相結合才有意義�����,因此三維區域的無線傳感器節點定位應用價值較高[1]����。傳統的無線傳感器三維定位算法有Landscape-3D節點定位算法,該算法在未知節點之間無需通信,減小了通信開銷[2]����,但是需定位輔助設備��,同時每個節點需要存儲大量的觀測信息�����;基于球殼交集的三維定位算法僅對信標節點進行2次廣播����,從而降低了通信開銷����,延長了網絡生存期[3]�����,但是定位覆蓋率、定位精度受信標節點密度影響較大,從而加大了節點的成本����,實用性較差��;Costrained3D節點定位算法能夠將未知節點轉化為信標節點來對距離相對更遠的未知節點進行定位[4],但是會產生誤差累積;APIT-3D算法不要求節點移動�����,能夠高度近似實現定位����,避免了大量數據向中心節點傳輸而造成的能量損耗[5],但是要求定位區域和未知節點與信標節點相鄰,該算法要求較高的信標節點密度��;Centroid-3D算法只需要用三維坐標值替代二維坐標值即可[6]�����,但是減小定位誤差卻不太明顯,甚至還有使其惡化的可能���。
1測距定位過程
1.1基于四邊測距算法模型在使用節點進行定位時��,未知節點附近的信標節點數量往往多于3個����,在三邊測距的基礎上,再添加1個信標節點參與定位����,采用未知節點周圍較近的4個信標節點來進行質心計算��,四邊測距法示意見圖1。
?�。保参粗濣c到信標節點的距離迭代求精設未知節點l的初始估計位置(xel��,yel��,zel)到信標節點(x,y��,z)距離計算公式如下:dl=(x-xel)2+(y-yel)2+(z-zel)2���。(8)得出對應估計距離為del�,泰勒級數展開式:dl=del+x-xeldelΔx+y-yeldelΔy+z-zeldelΔz+εl。(9)式中:Δx�����,Δy�����,Δz為相對偏差����。將未知節點與4個以上信標節點的距離所得的εl采用牛頓迭代�����,∑lεl2取最小值的解(Δx,Δy���,Δz)與(xel,yel����,zel)相加即可��,把相加結果作為下次的(xel,yel,zel)����,多次迭代直到滿足定位閾值要求[8-10]����。1.3數據優化通過迭代計算目標函數的最小值把未知節點的坐標優化[11-12],假設節點j(xj�����,yj���,zj)到未知節點i的距離函數如下:dji=(xj-xi)2+(yj-yi)2+(zj-zi)2�。(10)包含噪聲信息的距離值為d⌒ji,優化目標函數如下:d′ji=1N∑Ni=1(dij-d⌒ji)2����。(11)式中:N為未知節點數���。在三維空間需要較多的節點才能滿足空間測距定位,對某個未知節點可能存在多個鄰居信標節點����,但是估計的時候僅需要任意4個即可����,因此存在多估計的可能性�,對于估算到的未知節點的一系列位置需要進行過濾。定位閾值dth:dth=3L3×A3/(S×P×43πR3)。(12)式中:L為空間立方體邊長�;A為每個未知節點定位需要的平均信標節點數���;S為網絡中節點總數���;P為信標節點的比例���;R為節點通信半徑���。
2仿真試驗
仿真試驗構造了邊長為1000m的正方體三維空間試驗區域�,面積為1000m×1000m�����,該空間區域內隨機投放了200個節點����,其中信標節點比例控制在10%~30%�����,信標節點的通信半徑為30m�����,未知節點通信半徑為20m�����,節點一經部署�,位置不再變化�,程序采用Matlab實現。
?��。玻毙艠斯濣c數量、通信半徑對定位誤差影響的對比仿真
定位精度通過平均定位誤差與節點的通信半徑的比值來衡量:Rerror=∑ni=m+1(Xiest-Xireal)2(n-m)×R�����。(14)式中:Xiest�、Xireal分別為未知節點的估計值、真實值��;Rerror為定位誤差��;n��、m分別為節點總數�����、信標節點數;R為節點通信半徑。圖3給出本研究算法與其他算法定位精度對比分析���,試驗結果均是15次蒙特卡羅獨立仿真平均值。在信標節點數量相同的情況下,本研究算法與其他算法相比����,平均定位誤差下降明顯����,各種算法均隨信標節點數的增加����,定位誤差呈下降趨勢�,其中,在信標節點分布比例為25%時�����,本研究算法定位效果最好�,歸一化平均誤差下降40%以上;隨著信標節點比例的增加�,本研究算法的定位誤差下降速度最快���,并且定位誤差與其他算法間隔比較大��,定位誤差最小,定位精度較高�;同時隨著通信半徑的增加��,由于通信半徑增加后導致節點接收到的數據量增多,對節點間跳數估計準確性降低�����,但是本研究算法定位誤差降低幅度較其他算法小��。
?�。玻捕ㄎ徽`差與定位時間關系仿真
圖4的試驗結果是15次蒙特卡羅獨立仿真平均值,可以看出�,定位誤差隨著定位測試時間的變化而不斷變化���。在剛開始5s內���,各種算法定位誤差均為最大,本研究算法整體定位誤差比其他算法低,并且變化幅度較小,定位性能趨于穩定,定位誤差范圍在1~3m之間����,在一定程度上提高了定位精度�����,對環境具有較好的適應性。
3總結
本研究采用改進四邊測距算法對無線傳感器目標定位,通過4個查詢節點的坐標構造與信標節點的線性方程����,根據標準最小均方差估計方法確定位置節點坐標�����,未知節點到信標節點的距離采用牛頓迭代求精,對鄰居位置相對不集中的節點進行排除。試驗仿真顯示,隨著信標節點比例的增加,本研究算法的定位誤差下降速度最快,并且定位誤差與其他算法間隔比較大,定位誤差最小�����,定位精度較高����。因此,本研究可為智慧農業無線傳感器精確定位目標提供一種新思路��。
參考文獻
?��。?]吳君欽,盧陶.基于RSSI測距的無線傳感器網絡定位算法[J].微電子學與計算機���,2014,31(5):49-52.
?�。?]馮向科���,沈雪梅.基于WSN定位的Euclidean算法改進研究[J].科技通報���,2013�����,29(2):124-126.
[3]胡中棟,謝金偉.基于山區地形的無線傳感器網絡三維定位機制[J].傳感技術學報��,2015����,28(3):408-411.
[4]周禮爭,唐瑞���,張乙竹,等.無線傳感器網絡中APIT-SC三維定位算法[J].傳感器與微系統,2015�����,34(7):104-106.
?���。?]葛斌,鄭建寶,韓江洪.RSSI輔助的三維空間坐標四面體質心定位算法[J].計算機科學���,2015�����,42(4):81-84.
[6]廖興宇,汪倫杰.基于UWB/AOA/TDOA的WSN節點三維定位算法研究[J].計算機技術與發展,2014,24(11):61-64.