摘要:摘要 針對廟溝鐵礦露天轉地下開采過程中現有系統設備老化�����,集控中心空間狹小無法滿足礦山井下智能化開采要求等問題,從礦山地面與井下智能化建設角度出發�����,對該礦地表環網主干網絡�、
摘要 針對廟溝鐵礦露天轉地下開采過程中現有系統設備老化,集控中心空間狹小無法滿足礦山井下智能化開采要求等問題,從礦山地面與井下智能化建設角度出發����,對該礦地表環網主干網絡����、地表風機房�、井下中央水泵房、破碎系統與電機車遠程駕駛系統進行了智能化建設研究,形成露天轉地下礦山綜合一體化智能建設體系。礦山智能化建設完成后����,非計劃停工時間大幅降低�,設備操作人員減少了30人���,總體經濟效益為255萬元�����,有效提高了開采的綜合管理與安全生產水平。研究成果可為其他露天轉地下礦山智能化建設提供指導與借鑒�。
關鍵詞 露天轉地下礦山;智能化;破碎系統;遠程駕駛系統
論文《某露天轉地下礦山智能化體系建設與應用》發表在《現代礦業》��,版權歸《現代礦業》所有���。本文來自網絡平臺��,僅供參考。
引言
礦山智能化建設對于優化礦山生產模式與提高礦產資源綜合利用率具有重要作用�,也對礦山生產過程中減少人員傷亡與加快和諧礦山的建設具有顯著意義[1-3]����。在礦山智能化建設研究方面��,何斌全等[4]建立了柿竹園智能化建設總體框架�����,提出了基礎通信網絡、工業大數據中心、智能管控平臺、智能采選系統等建設的具體內容;戰凱等[5]分析了地下金屬礦智能開采技術架構及關鍵技術,認為中國地下金屬礦智能開采領域需要攻克開采連續化、無人裝備作業集群化難題;李冬萍[6]提出了構建“系統+一網絡+一平臺+N智能應用”的智能化礦山建設架構��,作為智能化礦山建設技術路線;向軍[7]指出通過智能礦山建設�����,實現“少人化����、無人化”是安全高效回采的關鍵舉措����,也是提升礦山安全本質安全水平的重要路徑��。綜合文獻分析�,對于金屬礦山智能化建設主要集中在整體構架的建設及未來發展趨勢分析方面��,而對于露天轉地下礦山智能化建設方面提及較少����。以廟溝鐵礦露天轉地下開采為工程背景�����,從礦山地面與井下智能化建設角度出發��,對礦山的主要系統進行智能化建設研究,以實現礦山高效���、低成本開采的目標。
1 礦山概況
廟溝鐵礦經過約20a開采�����,目前已采至-408m標高附近����,露天轉地下開采工程包括主井礦石提升系統、副井人員及材料提升系統�����、粉礦回收系統��、-80m破碎系統、0m排水系統、-240m放礦及礦巖運輸系統等。除主井工程溜破系統、粉礦回收系統����、副井-240m中段放礦機硐室����、主副井井塔樓���、35kV變電站�、皮帶通廊未建設完成外,其他各系統,如主井、副井、東西回風豎井���、大小斜坡道斜井、各水平巷道掘進及支護工程已完成施工,陸續進入設備安裝階段����。目前,礦山現有網絡系統有待進一步更新�����,集控系統空間不足,亟需對露天轉地下生產系統實施智能化建設研究����。
2 地表主要設施智能化建設
2.1 廟溝鐵礦通過在地面構建集調度指揮與數據網絡于一體的智能化中心�����,為全礦數據共享、科學排產�、智能設備管理���、精準能源管控打下良好的基礎����。以露天轉地下開采工程建設為契機���,需要完成露天轉地下開采系統智能化建設���,實現井下生產智能化���,以此帶動地表及井下主要生產系統逐步實現智能化升級�����,完成露天轉地下開采工程智能化建設,并且每年對見效快、實施必要性強的生產系統項目進行自動化改造�����,逐步完成主干網絡���、風機房及各生產系統的整體智慧礦山布局����。
2.2 環網主干網絡建設
2.2.1 控制環網主干網絡建設
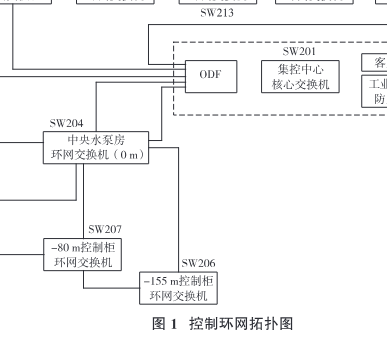
控制環網主干網絡主要從集控中心內的機房出線,沿地表環網光纖線桿敷設至大斜坡道,通過掛鉤敷設至主井0m中央水平環網交換機,經光模塊沿盲提升豎井敷設至-80m破碎配電硐室環網交換機與-155m配電硐室控制柜環網交換機,然后經由破碎系統回風井回到0m中央水泵房二層核心交換機組成地下控制環網�����,再由中央水泵房環網交換機經副井回到地面經地表橋架����、電纜溝回到集控中心組成環網,控制環網拓撲圖如圖1所示����。
2.2.2 地表視頻監測主干網絡建設
對于視頻監測主干網絡的建設,主要從集控中心內的機房出線���,沿電纜溝敷設至35kV變電站—西風井—副井—空壓機站—主井—1#轉運站—2#~3#轉運站—4#~5#轉運站所在位置的POE視頻環網交換機,最終回到集控中心視頻環網交換機�����,東風井視頻環網交換機放射接入集控中心環網交換機���,地表視頻控制網絡拓撲圖如圖2所示�。
2.3 地表風機房智能化建設
地表風機房智能化建設目標為提高通風有效利用率,最大限度避免通風不足以及過度通風情況的發生��,更有效地排出掘進工作面的礦塵及各種有害氣體�����,在保障安全生產的條件下��,降低能耗及人工成本。廟溝鐵礦通風系統主要包括東����、西風井的風機�,主機設備配置應基本相同,風機電氣系統一次回路采用相同的拓撲結構�,控制系統功能及配置一致�。
操作控制系統架構采用“視頻監控+PLC控制”模式��,采用EIC三電合一自動化控制�����,將變頻器傳動及高低壓配電系統接口信號、切換柜狀態監視信號����、風機風門的操作與監視信號、風機在線監測及保護傳感器信號接入到PLC控制站���,集控中心內的操作人員可實現風機的遠程控制和運行情況監控。風機控制系統為保證風機組能夠滿足邏輯和啟停閉鎖控制的智能化需要�����,核心元件采用西門子公司S7-1200系列可編程控制器�����。風機房自控系統架構如圖3所示���。
遠控時����,設備的控制和狀態顯示��、報警均由集控中心后臺監控系統實現����,每個風機控制站點設置就地與遠控操作接口;現場操作時�,可單獨控制每臺風機,實現現場風機的啟動��、調頻操作以及遠程單臺風機的調頻正反轉操作���。任意風機故障時����,可遠程急停故障風機,不影響其他站點風機運行���,各風機房內的風機均為單獨控制和操作�,互不干擾。正常時以遠程操作為主,檢修或故障時可采用就地控制���,遠程、就地的優先級根據要求確定,或采用互鎖方式進行。每個風機房PLC控制站形成相對獨立控制系統能獨立運行���,每臺控制柜盤面設置人機界面,就地操作時,可顯示系統狀態���。
3 井下主要設施智能化建設
3.1 中央水泵房智能化建設
中央水泵房智能化體系搭建的主要目的在于能夠保證水泵房內主要設備和管路的全方位監控,對此采用布設視頻監控的方式來實現,然而攝像頭安裝位置的選擇要充分考慮到監控關鍵區域����,實現水泵本體��、主排水管路、泵房內環境及控制柜等所有設備的狀態全方位監視。單個泵房內的視頻信號統一匯總到一個單獨的配電箱,通過光纖傳輸到地面集控中心����。配電箱內置攝像頭供電���、視頻信號轉換及信號傳輸模塊����。
3.1.1 自控系統架構
中央水泵房自控系統構架如圖4所示���。系統架構主要由集中監控站���、PLC控制站、和基本設備層3個層級組成,對各設備如主排水泵���、引水回路、閘閥���、球閥��、傳感器����、儀表等進行管理和控制��,整體布置如下:
(1) 監控層����。形成1個集中監控站���,排水系統后臺的監控系統位于地面集控中心和現場����,實現排水泵房的集中操控、狀態監控��,PLC分站組態�����、程序管理���。
(2) 控制層�。由PLC控制站組成�����,在中央水泵房有獨立CPU�����,實現排水系統的控制��,對所屬泵房排水設備的信號采集�、啟??刂啤⑦壿嬁刂?��、狀態監控等功能。中央水泵房主PLC接入控制環網�����,保障網絡通訊的可靠性�。
3.1.2 自控系統功能
將0m中央水泵房、副井和粉礦回收井井窩水泵���、-155m水平排水系統的排水設備作為整體控制區,配置PLC自動控制站及配電���、操作設備,實現整個泵房的水泵集中控制和數據監測���。配套的自動化系統,主要實現以下功能:
(1) 負責所有水泵及閥門儀表的啟?����?刂?���、保護控制、數據采集��、狀態監視�,提供泵房內所有設備的驅動回路及控制接口,多種操作方式的實現和轉換�。
(2) 有就地����、遠程�����、手動�、自動多種操作控制方式���,滿足排水系統無人及檢修����、應急工況下的操作及控制。
(3) 根據礦山排水系統特點����,編制多樣化及適應性啟泵排水控制工藝軟件��,實現水泵正常�����、節能等多種排水方式。
(4) 為上級自動化系統平臺提供泵房內設備運行數據�,接收集控室發送的調度指令���,實現該泵房內所有設備的控制和狀態監視�����。
3.2 井下破碎系統智能化建設
破碎控制系統為“視頻監控+PLC控制”模式�����,采用EIC三電合一自動化控制。破碎機PLC站完成破碎機、振動放礦機、鏈式閘門、除塵風機、各種傳感器����、儀表的管理和控制,集控中心監控站負責所有設備的遠程監視及集中調控管理。PLC讀取碎前料倉及碎后料倉料位并上傳,振動放礦機�、顎式破碎機、料倉實現聯鎖控制,逆序啟停�����。
當破碎機(振動放礦機)準備進行工作時,能夠就地�、遠程發送預警信息,啟動也會有所延遲,目的是對作業人員實施有效防護���。當系統停機后�,延時關閉除塵裝置。振動放礦機采用變頻電機,用于調節破碎機的給礦量����,實時監測破碎腔內料位高度���,將料位高度送入到PLC中,根據料位設定值,實現閉環調節振動放礦機變頻器頻率。遠程監控站設置在地表集控中心���,PLC控制站由破碎機成套PLC控制柜及破碎系統控制柜組成����。破碎機成套PLC位于破碎機啟動柜旁����,破碎系統控制柜設置在破碎配電硐室,配置S7-1200型主控制CPU���,柜內配置光纖交換機接入控制環網���。破碎系統智能化控制架構如圖5所示�。
3.3 井下電機車遠程駕駛系統智能化建設
3.3.1 遠程駕駛系統邏輯構架
電機車遠程駕駛系統是以提升運輸效率�����、降低系統作業人員數量及運維成本為目標的礦山生產綜合管理系統�����,能夠顯著提升采裝與運輸效率���,優化生產運輸調度�,合理利用資源,降低生產成本�����,保障生產作業安全,是建設智能化���、科技化及未來無人化礦山的重要支撐系統��,其邏輯架構如圖6所示�。
3.3.2 調度中心控制系統
機車駕駛平臺布置在地表集控中心,為了讓從調度傳達的信息準確發送給電機車駕駛人員�,并及時得到信息反饋�,實現一人控制多臺電機車無人駕駛,從而更能保障運輸安全�,提高運輸效率����,推動實現礦山井下生產及運輸自動化���。井上機車駕駛平臺如圖7所示�����。
遠程操作監視平臺部署在采礦集控中心�,可監視自動運行機車狀態�,并借助視頻監控信息及系統派配信息��,由駕駛人員遠程操作控制機車。顯示器上主要包括了圖像、機車遙控及軌道運輸3個監測系統。操控人員能夠通過顯示屏幕直接查看電機車運行相關的數據參數以及處于巷道中的其余機車所處的位置和相關監控信息�����,據此通過遠程駕駛臺來操作控制機車行駛�����。
3.3.3 多機車控制及反饋監視
控制系統能夠實現多個機車的協同控制����,機車運行過程中��,利用系統自動信號切換功能可以實現對機車的有效調度及控制,通過監控畫面能夠觀察電機車運行狀態及控制模式�����,一旦發生故障情況,會觸發聲光報警�,進行及時提醒����。機車駕駛平臺支持多種機車控制方式:
(1) 遠程駕駛方式��。駕駛人員通過遠程駕駛平臺��,經由無線通信網絡對機車進行實時行駛控制,實現有軌運輸的無人化和高效化����。
(2) 原有操作盤控制方式。遠程駕駛方式控制方式不改變電機車的原有操作盤系統����,機車司機仍可手動駕駛機車��。
3.3.4 電機車檢修預維護系統
通過開發電機車檢修預維護系統,解決電機車維修依靠原始人工記錄效率低下問題,系統通過記錄每輛礦車行駛時間,定期檢點車斗弓片���、車斗間連接環等是否有裂痕。確保按時點檢錄入準確信息,當礦車輪對���、車斗弓片、車斗間連接環等達到壽命使用臨界值時,電機車檢修預維護系統通過系統預警信息��,通知相應人員進行設備更換�����,建立設備預知性分析平臺�,大幅降低非計劃停工時間����。
4 現場應用效果
礦山智能化建設完成后,有效排出掘進工作面的礦塵及各種有害氣體,降低能耗���,與此同時可實現整個泵房的水泵集中控制和數據監測。通過將機車駕駛平臺布置在地表集控中心�����,實現一人控制多臺電機車無人駕駛�。與智能化建設前相比,風機房����、中央水泵房����、井下破碎站與電機車操作人員總人數由原來的48人減少為18人�����,按照人均年工資8.5萬元考慮,總計實現經濟效益255萬元��,非計劃停工時間大幅降低���,有效提高了開采的綜合管理與安全生產水平��。
5 結論
(1) 對于環網主干網絡智能化建設����,給出了控制環網主干網絡及視頻監測主干網絡建設方法;對于風機房智能化建設��,給出了自控系統架構�、具體操控及主要功能實現方法。
(2) 中央水泵房實現了水泵本體�,主排水管路�,泵房內環境����、控制柜等所有設備的狀態全方位監視;破碎控制系統采用“視頻監控+PLC控制”模式,可實現EIC三電合一自動化控制;機車駕駛平臺布置在地表集控中心���,可實現一人控制多臺電機車無人駕駛。
(3) 系統智能化建設完成后����,操作人員可由原來的48人減少為18人����,總體經濟效益為255萬元�,有效提高了廟溝鐵礦露天轉地下開采的綜合管理與安全生產水平�。
參考文獻
[1] 丁亮亮,馮建�,高大林����,等. 白象山鐵礦一鍵充填智能化系統研究與應用[J]. 現代礦業, 2022, 38(12): 18-21.
[2] 何曉武. 崩落轉充填開采礦山的安全智能化監控預警技術研究[J]. 采礦技術, 2021, 21(3): 95-99.
[3] 鄭向黨�,于小海,王秀東�����,等. 金川二礦區礦山智能化采礦的研究與探索[J]. 現代礦業, 2021, 37(11): 237-238, 251.
[4] 何斌全, 張維國, 伏彩萍, 等. 柿竹園多金屬礦智能化建設思路[J]. 有色設備, 2022, 36(4): 1-5.
[5] 戰凱���,呂瀟���,金楓��,等. 地下金屬礦智能開采技術與裝備現狀及“十四五”的思考[J]. 智能礦山�,2021, 2(1): 11-15.
[6] 李冬萍. 地下銅礦山智能化建設架構研究與應用[J]. 有色礦冶, 2023, 39(5): 58-61.
[7] 向軍. 非煤地下礦山“少人化無人化”的實施路徑[J]. 采礦技術, 2023, 23(5): 239-241.