摘要:電網(wǎng)短路故障下,并聯(lián)運(yùn)行的新能源構(gòu)網(wǎng)型變換器暫態(tài)交互作用顯著增強(qiáng),增加了系統(tǒng)暫態(tài)同步失穩(wěn)風(fēng)險(xiǎn)。文中首先建立了構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)暫態(tài)交互模型。其次,借助傳統(tǒng)同步發(fā)電機(jī)穩(wěn)
電網(wǎng)短路故障下,并聯(lián)運(yùn)行的新能源構(gòu)網(wǎng)型變換器暫態(tài)交互作用顯著增強(qiáng),增加了系統(tǒng)暫態(tài)同步失穩(wěn)風(fēng)險(xiǎn)。文中首先建立了構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)暫態(tài)交互模型。其次,借助傳統(tǒng)同步發(fā)電機(jī)穩(wěn)定理論,分析了暫態(tài)交互能量影響變換器穩(wěn)定性的作用機(jī)理,進(jìn)一步揭示了交互能量作用下的功角牽引機(jī)制將促使多變換器穩(wěn)定性趨近一致或致使穩(wěn)定性較差的變換器加速失穩(wěn)。由此,提出了計(jì)及限流切換的構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)穩(wěn)定域構(gòu)建方法,并通過(guò)穩(wěn)定域分析了變換器運(yùn)行狀態(tài)及控制參數(shù)對(duì)系統(tǒng)暫態(tài)穩(wěn)定性的影響規(guī)律。最后,仿真和實(shí)驗(yàn)結(jié)果驗(yàn)證了理論分析的正確性。
關(guān)鍵詞:構(gòu)網(wǎng)型變換器;暫態(tài)穩(wěn)定;并聯(lián)運(yùn)行;暫態(tài)交互能量;穩(wěn)定域;限流
論文《計(jì)及限流切換的構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)暫態(tài)同步穩(wěn)定分析》發(fā)表在《電力系統(tǒng)自動(dòng)化》,版權(quán)歸《電力系統(tǒng)自動(dòng)化》所有。本文來(lái)自網(wǎng)絡(luò)平臺(tái),僅供參考。
0 引言
大力發(fā)展風(fēng)、光等新能源是中國(guó)實(shí)現(xiàn)“雙碳”戰(zhàn)略目標(biāo)的重要舉措,截至2023年底,風(fēng)電、光伏發(fā)電的裝機(jī)容量為1.05 TW,占比達(dá)到36%,發(fā)電量為1200 TW·h,占比達(dá)到15.3%[1]。預(yù)計(jì)到2030年,風(fēng)電、光伏發(fā)電裝機(jī)容量占比和發(fā)電量占比將分別達(dá)到40%和20%[2]。基于跟網(wǎng)型(grid-following, GFL)控制架構(gòu)的大規(guī)模新能源經(jīng)電力電子變換器(下文簡(jiǎn)稱“變換器”)接入電網(wǎng)導(dǎo)致同步發(fā)電機(jī)主導(dǎo)的電網(wǎng)穩(wěn)定特性發(fā)生顯著變化[3],暫態(tài)、動(dòng)態(tài)主動(dòng)支撐能力持續(xù)減弱[4],給電網(wǎng)安全穩(wěn)定運(yùn)行帶來(lái)嚴(yán)峻挑戰(zhàn)。借鑒同步發(fā)電機(jī)物理機(jī)理、能夠自主建立交流電壓并通過(guò)自身輸出功率實(shí)現(xiàn)與交流電網(wǎng)同步的構(gòu)網(wǎng)型(grid-forming, GFM)變換器被視為解決上述問(wèn)題的有效手段之一[5]。
雖然借鑒了同步發(fā)電機(jī)物理機(jī)理,但是構(gòu)網(wǎng)型變換器暫態(tài)穩(wěn)定動(dòng)力學(xué)特性相比同步發(fā)電機(jī)更為復(fù)雜:一方面,構(gòu)網(wǎng)型變換器控制架構(gòu)多樣[5-7],且控制參數(shù)選取不受物理限制、靈活性較高[8];另一方面,構(gòu)網(wǎng)型變換器故障下切換為限流控制模式,功角特性曲線復(fù)雜多變[9-10]。因此,構(gòu)網(wǎng)型變換器暫態(tài)同步穩(wěn)定分析結(jié)論并不能直接套用同步發(fā)電機(jī)。近年來(lái),國(guó)內(nèi)外學(xué)者圍繞構(gòu)網(wǎng)型變換器同步控制架構(gòu)、內(nèi)外環(huán)方案、限流策略對(duì)暫態(tài)同步穩(wěn)定性的影響以及暫態(tài)穩(wěn)定性提升策略展開(kāi)了大量研究,并取得了諸多研究成果。文獻(xiàn)[11]研究了故障后平衡點(diǎn)是否存在對(duì)穩(wěn)定性的影響,提出了提升暫態(tài)穩(wěn)定性的控制器設(shè)計(jì)方法;文獻(xiàn)[12-13]通過(guò)臨界切除角和臨界切除時(shí)間量化分析了不同同步控制環(huán)節(jié)、無(wú)功電壓控制環(huán)節(jié)、內(nèi)外環(huán)對(duì)暫態(tài)穩(wěn)定性的影響,并通過(guò)功角特性揭示了構(gòu)網(wǎng)型變換器暫態(tài)失穩(wěn)機(jī)理。文獻(xiàn)[14]研究了限流模式對(duì)變換器暫態(tài)穩(wěn)定性的影響,并給出了提升臨界切除時(shí)間的限流模式下最優(yōu)電流相位角。上述研究均以單構(gòu)網(wǎng)型變換器并網(wǎng)系統(tǒng)為研究對(duì)象,其結(jié)論無(wú)法直接拓展到多變換器系統(tǒng)中。
未來(lái),構(gòu)網(wǎng)型變換器并聯(lián)運(yùn)行場(chǎng)景將廣泛存在于新能源場(chǎng)站內(nèi)。從廣義上講,新能源基地多個(gè)構(gòu)網(wǎng)型場(chǎng)站的并列運(yùn)行也屬于該范疇。已有研究表明,變換器并聯(lián)運(yùn)行暫態(tài)交互作用顯著,交互耦合路徑不僅存在于變換器與電網(wǎng)間,還存在于變換器間[15-16]。更為重要的是,變換器暫態(tài)交互還受限流模式切換[17]、變換器響應(yīng)時(shí)序不一致[18-19]等問(wèn)題耦合影響,增加了并聯(lián)系統(tǒng)分析的困難。現(xiàn)有構(gòu)網(wǎng)型變換器并聯(lián)運(yùn)行研究主要集中在小擾動(dòng)穩(wěn)定性,鮮有從系統(tǒng)層面研究大擾動(dòng)暫態(tài)穩(wěn)定。如文獻(xiàn)[18]建立多虛擬同步發(fā)電機(jī)(virtual synchronous generator, VSG)并聯(lián)系統(tǒng)的單機(jī)等值模型,根據(jù)參數(shù)靈敏度分析,揭示了系統(tǒng)參數(shù)及控制參數(shù)對(duì)振蕩頻率的影響規(guī)律。文獻(xiàn)[20]利用單輸入單輸出等值模型,并結(jié)合奈奎斯特準(zhǔn)則,對(duì)VSG并網(wǎng)系統(tǒng)進(jìn)行了穩(wěn)定性分析。此外,文獻(xiàn)[21]提出了微網(wǎng)中VSG協(xié)同控制方法,改善了微網(wǎng)中多VSG間暫態(tài)失步問(wèn)題,但缺乏對(duì)系統(tǒng)穩(wěn)定性影響的分析和探討。文獻(xiàn)[22]建立了構(gòu)網(wǎng)型變換器與跟網(wǎng)型變換器交互模型,發(fā)現(xiàn)注入電流對(duì)VSG暫態(tài)穩(wěn)定性的影響主要由功率耦合項(xiàng)決定,但未涉及對(duì)構(gòu)網(wǎng)型變換器并聯(lián)運(yùn)行暫態(tài)穩(wěn)定性的分析。構(gòu)建穩(wěn)定域是分析系統(tǒng)暫態(tài)穩(wěn)定性的有效途徑,已有文獻(xiàn)通過(guò)構(gòu)建變換器穩(wěn)定域判斷系統(tǒng)的大擾動(dòng)暫態(tài)穩(wěn)定性[23],但相關(guān)研究聚焦在單臺(tái)VSG[24]或VSG并聯(lián)跟網(wǎng)型變換器系統(tǒng)[25],缺乏計(jì)及限流切換的構(gòu)網(wǎng)型變換器并聯(lián)運(yùn)行穩(wěn)定域構(gòu)建方法研究。
針對(duì)上述問(wèn)題,本文首先建立了構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)暫態(tài)交互模型。其次,借助傳統(tǒng)同步發(fā)電機(jī)穩(wěn)定理論,分析了暫態(tài)交互能量影響變換器穩(wěn)定性的作用機(jī)理,進(jìn)一步揭示了交互能量作用下的功角牽引機(jī)制將促使多變換器穩(wěn)定性趨近一致或致使穩(wěn)定性較差的變換器加速失穩(wěn)。由此,提出了計(jì)及限流切換的并聯(lián)系統(tǒng)穩(wěn)定域構(gòu)建方法,并通過(guò)穩(wěn)定域分析了運(yùn)行狀態(tài)及控制參數(shù)對(duì)暫態(tài)穩(wěn)定性的影響規(guī)律。最后,仿真和實(shí)驗(yàn)結(jié)果驗(yàn)證了上述理論分析的正確性。
1 變換器并聯(lián)系統(tǒng)暫態(tài)交互模型
1.1 同步架構(gòu)及限流控制模式
構(gòu)網(wǎng)型變換器的同步方式可以依據(jù)被控對(duì)象分為有功功率同步[26]和直流電壓同步[27]兩大類。有功功率同步又可細(xì)分為下垂控制、虛擬同步控制等。下垂控制僅模擬同步發(fā)電機(jī)有功-頻率一階下垂特性,雖不存在暫態(tài)失穩(wěn)問(wèn)題,但缺少有功功率的慣性響應(yīng),這對(duì)于低慣量電力系統(tǒng)中頻率穩(wěn)定至關(guān)重要,有必要保留慣性響應(yīng)。基于直流電壓同步的控制方式會(huì)在暫態(tài)穩(wěn)定性分析中引入直流動(dòng)態(tài),增加研究問(wèn)題的復(fù)雜性。因此,本文采用目前主流的模擬同步發(fā)電機(jī)轉(zhuǎn)子二階方程的構(gòu)網(wǎng)型變換器同步控制架構(gòu),其功角特性曲線以及暫態(tài)穩(wěn)定性與同步發(fā)電機(jī)并無(wú)本質(zhì)不同。但是同步控制參數(shù)會(huì)影響變換器同步動(dòng)態(tài),進(jìn)而對(duì)暫態(tài)穩(wěn)定性產(chǎn)生較大影響。同步控制架構(gòu)如附錄A圖A1所示。
短路故障下構(gòu)網(wǎng)型變換器同步環(huán)節(jié)可以使用功率同步環(huán)生成參考相位,也可以切換為鎖相環(huán)提供參考相位[28],與電網(wǎng)保持同步。切換為鎖相環(huán)同步時(shí),其穩(wěn)定動(dòng)力學(xué)模型與跟網(wǎng)型變換器完全等價(jià),雖可以在一定程度上限制故障電流,但鎖相環(huán)動(dòng)態(tài)的引入將增加故障及恢復(fù)過(guò)程中暫態(tài)同步失穩(wěn)風(fēng)險(xiǎn)[29]。因此,故障下仍然采用功率同步環(huán)生成基準(zhǔn)相位,后文均基于此方式進(jìn)行分析。
構(gòu)網(wǎng)型變換器無(wú)功電壓控制環(huán)節(jié)影響電壓跌落程度和恢復(fù)速度,進(jìn)而影響暫態(tài)穩(wěn)定性,控制架構(gòu)如附錄A圖A2所示。值得注意的是,考慮到短路故障觸發(fā)電流限幅環(huán)節(jié)動(dòng)作情況下,內(nèi)電勢(shì)幅值不受無(wú)功電壓環(huán)控制,相當(dāng)于無(wú)功電壓環(huán)在限流時(shí)被旁路,不影響暫態(tài)同步穩(wěn)定分析。
短路故障下,變換器功角特性曲線由電流限幅算法決定,合適的電流限幅算法有助于提升暫態(tài)同步穩(wěn)定性。目前,主流的限流算法包括虛擬阻抗限幅[30]和電流內(nèi)環(huán)限幅[14]兩類,已有文獻(xiàn)證明,虛擬阻抗限幅方法在故障開(kāi)始的數(shù)毫秒內(nèi)效果不及電流內(nèi)環(huán)限幅控制[17]。因此,本文在電壓幅值單環(huán)控制的基礎(chǔ)上增加電流內(nèi)環(huán)進(jìn)行故障限流控制,其結(jié)構(gòu)如附錄A圖A3所示。
1.2 并聯(lián)系統(tǒng)拓?fù)浣Y(jié)構(gòu)
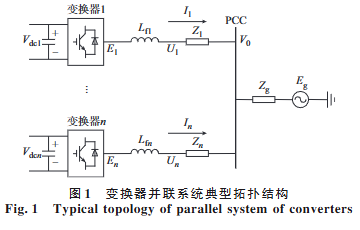
構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)接入電網(wǎng)拓?fù)浣Y(jié)構(gòu)如圖1所示。圖中:變換器通過(guò)濾波電感(L_{fi})和阻抗為(Z_i)的線路連接到一個(gè)公共耦合點(diǎn)(point of common coupling, PCC)母線上,經(jīng)過(guò)線路阻抗(Z_R)與無(wú)窮大電網(wǎng)(E_g)連接;(V_{dci})、(E_i)、(U_i)、(I_i)分別為第(i)臺(tái)變換器的直流側(cè)電壓、內(nèi)電勢(shì)幅值、端電壓幅值、輸出電流幅值,其中,(i=1,2,cdots,n),(n)為變換器數(shù)量;(L_{fi})、(Z_i)分別為第(i)臺(tái)變換器的濾波電感值和所在線路對(duì)應(yīng)的線路阻抗值;(V_0)為PCC的電壓幅值。
圖1 變換器并聯(lián)系統(tǒng)典型拓?fù)浣Y(jié)構(gòu)
Fig.1 Typical topology of parallel system of converters
1.3 暫態(tài)交互模型及驗(yàn)證
本文以2臺(tái)變換器并聯(lián)系統(tǒng)為例,分析變換器間暫態(tài)交互對(duì)并聯(lián)系統(tǒng)穩(wěn)定性的影響。以變換器和理想電源并網(wǎng)母線作為端口,經(jīng)星形-三角形變換消去PCC,得到變換后的等值電路如圖2所示。圖中:(delta_1)、(delta_2)、(delta_g)分別為變換器1、變換器2、理想電源的功角;(Z_{1g})、(Z_{2g})、(Z_{12})分別為星形-三角形變換后變換器1與理想電源間、變換器2與理想電源間、變換器1與變換器2間的阻抗。并聯(lián)變換器接入系統(tǒng)可視為3機(jī)暫態(tài)相互作用系統(tǒng),故障下,任意1臺(tái)設(shè)備均與其他2臺(tái)設(shè)備存在暫態(tài)交互,該交互作用影響變換器虛擬轉(zhuǎn)子加減速動(dòng)態(tài),繼而又對(duì)三者交互產(chǎn)生影響。下文將對(duì)此進(jìn)行建模分析。
圖2 消去PCC的等值電路
Fig.2 Equivalent circuit after eliminating PCC
假定所有阻抗均為感性,分別為變換器1與理想電源間、變換器2與理想電源間、變換器1與變換器2間的電抗。系統(tǒng)節(jié)點(diǎn)電壓方程為:
式中:(Y_{ii})為變換器的自導(dǎo)納,其中,(i=1,2);(Y_{ij})為變換器間的互導(dǎo)納,(j=1,2);(Y_{g1})和(Y_{1g})為變換器1與理想電源間的互導(dǎo)納;(Y_{g2})和(Y_{2g})為變換器2與理想電源間的互導(dǎo)納;(Y_{gg})為理想電源的自導(dǎo)納;(dot{I}_1)、(dot{I}_2)、(dot{I}_g)分別為變換器1、變換器2、理想電源輸出的電流相量;(dot{E}_1)、(dot{E}_2)、(dot{E}_g)分別為變換器1、變換器2、理想電源的內(nèi)電勢(shì)相量。
根據(jù)短路故障后變換器是否觸發(fā)限流控制分為以下3種情況:
- 情況1:2臺(tái)變換器均未觸發(fā)限流控制;
- 情況2:僅1臺(tái)變換器觸發(fā)限流控制;
- 情況3:2臺(tái)變換器均觸發(fā)限流控制。
對(duì)于2臺(tái)變換器均未觸發(fā)限流控制的情況,求解式(1)得到變換器1和2的電磁功率分別為:
式中:(I_1)為限流變換器1的輸出電流。
變換器輸出電磁功率包含了變換器間以及變換器與理想電源間的交互功率。以僅1臺(tái)變換器觸發(fā)限流控制為例,式(4)中,(E_1E_gY_{1g}sin(delta_1-delta_g))表示變換器1通過(guò)支路(Y_{1g})與理想電源交互功率,(E_1E_gY_{12}Y_{22}^{-1}Y_{2g}sin(delta_1-delta_g))表示變換器1經(jīng)(Y_{12})、(Y_{2g})支路與理想電源交互功率,以上2項(xiàng)體現(xiàn)了變換器1與理想電源間的暫態(tài)交互作用;(E_1Y_{12}Y_{22}^{-1}I_2cos[delta_1-(delta_2+varphi)])表示變換器1與處于限流狀態(tài)的變換器2間的交互功率,該交互功率也存在于式(5)中,并且符號(hào)相反。式(5)中,(Y_{22}^{-1}Y_{2g}I_2E_gcos[(delta_2+varphi)-delta_g])表示變換器2經(jīng)支路(Y_{2g})與理想電源交互功率。可以看出,變換器1、變換器2和理想電源三者間存在暫態(tài)功率交互,在支路參數(shù)一定的情況下,三者交互作用大小與電壓幅值、相位、限流相位以及限流幅值有關(guān)。
進(jìn)一步的,考慮到暫態(tài)同步穩(wěn)定分析的時(shí)間尺度通常為百毫秒級(jí)以上,可以忽略電流內(nèi)環(huán)控制動(dòng)態(tài)和電磁暫態(tài)過(guò)程,僅考慮虛擬轉(zhuǎn)子運(yùn)動(dòng)過(guò)程。2臺(tái)構(gòu)網(wǎng)型變換器轉(zhuǎn)子運(yùn)動(dòng)方程為:
式中:(Deltaomega_1)和(Deltaomega_2)分別為變換器1和2的虛擬角速度變化量;(J_1)和(J_2)分別為變換器1和2的虛擬慣量,采用慣性時(shí)間常數(shù)表示,單位為s;(D_1)和(D_2)分別為變換器1和2的阻尼系數(shù);(P_{1ref})和(P_{2ref})分別為變換器1和2的參考有功功率。
式(8)與式(2)一式(7)共同構(gòu)成構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)暫態(tài)交互模型,其框圖如圖3所示。圖中:(omega_0)為基準(zhǔn)轉(zhuǎn)速;(omega_1)和(omega_2)分別為變換器1和2的虛擬轉(zhuǎn)速;(Delta P_{12})為變換器間交互功率;(s)為微分算子。
圖3 變換器并聯(lián)系統(tǒng)暫態(tài)交互模型
Fig.3 Transient interaction model of parallel system of converters
2 暫態(tài)同步穩(wěn)定性分析
電網(wǎng)短路故障持續(xù)期間及恢復(fù)過(guò)程中,并聯(lián)運(yùn)行的構(gòu)網(wǎng)型變換器與系統(tǒng)間存在復(fù)雜的暫態(tài)交互,該交互過(guò)程影響多機(jī)相對(duì)運(yùn)動(dòng)。同時(shí),又受到多機(jī)相對(duì)運(yùn)動(dòng)的影響。本章重點(diǎn)討論多機(jī)暫態(tài)交互作用對(duì)變換器暫態(tài)同步穩(wěn)定的影響機(jī)理,進(jìn)而揭示變換器暫態(tài)同步穩(wěn)定和失穩(wěn)機(jī)制。
2.1 暫態(tài)交互能量作用機(jī)理
根據(jù)第1章構(gòu)建的暫態(tài)交互模型,可推導(dǎo)多變換器暫態(tài)能量轉(zhuǎn)化特性,對(duì)式(8)進(jìn)行積分得到:
式中:(J)為采用慣性時(shí)間常數(shù)表示的慣量;(Deltaomega)為虛擬轉(zhuǎn)速偏差;(delta_0)為擾動(dòng)起始時(shí)刻變換器虛擬功角;(delta_t)為(t)時(shí)刻虛擬功角;(Delta E_K)為虛擬轉(zhuǎn)子動(dòng)能變化量;(P_e)和(P_{ref})分別為電磁功率和有功功率參考值;(Delta E_V)為虛擬轉(zhuǎn)子勢(shì)能變化量,由變換器與系統(tǒng)交互能量(Delta E_{cs})和變換器間交互能量(Delta E_{12})組成;(D)為阻尼系數(shù);(Delta E_D)為虛擬阻尼的耗散能量變化量。不難看出,在功角運(yùn)動(dòng)過(guò)程中,(Delta E_K)和(Delta E_V)呈現(xiàn)相互轉(zhuǎn)換特性,阻尼在能量轉(zhuǎn)換過(guò)程中能夠消耗過(guò)剩的動(dòng)能或勢(shì)能,促使功角收斂至平衡點(diǎn)。
設(shè)(P_{12})為變換器1流向變換器2的有功功率,則(Delta P_{12}=P_{12}-P_{12,0})為變換器1流向變換器2有功功率相對(duì)初始值的變化,本文定義為變換器間交互功率,其中,(P_{12,0})為故障發(fā)生前變換器1流向變換器2的有功功率。故障發(fā)生時(shí)刻至功角最大值時(shí)刻變換器間暫態(tài)交互能量表示為:
式(10)中等號(hào)右邊第1項(xiàng)(Delta E_{12}')是故障期間變換器間暫態(tài)交互能量,該值影響故障期間虛擬動(dòng)能最大值(Delta E_{K,max});第2項(xiàng)(Delta E_{12}'')是故障清除時(shí)刻至功角最大值時(shí)刻變換器間暫態(tài)交互能量,該值影響變換器可供轉(zhuǎn)化的最大勢(shì)能(Delta E_{V,max})。故障期間變換器暫態(tài)交互對(duì)變換器功角曲線影響通過(guò)圖4說(shuō)明。圖中:SEP和UEP分別表示穩(wěn)定平衡點(diǎn)和不穩(wěn)定平衡點(diǎn)。變換器間暫態(tài)交互能量在故障期間、恢復(fù)過(guò)程中均對(duì)暫態(tài)穩(wěn)定性產(chǎn)生影響。對(duì)于換流器并聯(lián)接入理想電源系統(tǒng),短路故障下變換器虛擬轉(zhuǎn)子加速,虛擬功角將超前理想電源。故障消失后,由于虛擬轉(zhuǎn)子慣量作用,功角將繼續(xù)運(yùn)動(dòng)直至達(dá)到(delta_{max}),故(delta_0<delta_c<delta_{max})。結(jié)合式(10)可知,(Delta E_{12}')與(Delta E_{12}'')的正負(fù)僅與(Delta P_{12})的正負(fù)相關(guān),而(Delta P_{12})的正負(fù)與變換器相對(duì)功角差變化相關(guān),下節(jié)將對(duì)此進(jìn)行說(shuō)明。當(dāng)(Delta E_{12}'>0)時(shí),故障期間變換器1向變換器2提供交互能量,變換器1加速動(dòng)能減少,有利于變換器1暫態(tài)穩(wěn)定;當(dāng)(Delta E_{12}''>0)時(shí),故障后變換器1向變換器2提供交互能量,變換器1可轉(zhuǎn)化勢(shì)能增加,同樣有利于變換器1暫態(tài)穩(wěn)定;反之,則不利于暫態(tài)穩(wěn)定。
圖4 暫態(tài)交互對(duì)變換器功角曲線的影響
Fig.4 Influence of transient interaction on power angle curve of converter
綜上,并聯(lián)系統(tǒng)受擾后暫態(tài)交互能量在變換器間流動(dòng),通過(guò)增加或減少虛擬動(dòng)能或勢(shì)能的方式對(duì)變換器暫態(tài)穩(wěn)定性產(chǎn)生影響。
2.2 暫態(tài)交互能量的牽引機(jī)制
假定故障能夠及時(shí)切除,變換器間相對(duì)功角不超過(guò)90°,變換器機(jī)端電壓能夠瞬間跟蹤指令值。在上述假定條件下進(jìn)行分析。根據(jù)兩機(jī)并聯(lián)暫態(tài)交互模型,對(duì)于故障后2臺(tái)變換器均不限流的情況,由式(1)可知,變換器1流向變換器2的功率為(E_1E_2Y_{12}sin(delta_1-delta_2)),變換器間交互功率為(Delta P_{12}=E_1E_2Y_{12}[sin(delta_1-delta_2)-sindelta_{12,0}]),其中,(delta_{12,0})為故障前變換器1與變換器2的功角差。對(duì)于2臺(tái)變換器均限流的情況,變換器1流向變換器2的功率為(Y_{12}(Y_{22}Y_{11}+Y_{12}Y_{12})^{-1}I_2I_1sin(delta_1-delta_2)),變換器間交互功率為(Delta P_{12}=Y_{12}(Y_{22}Y_{11}+Y_{12}Y_{12})^{-1}I_2I_1[sin(delta_1-delta_2)-sindelta_{12,0}])。由于(E_1)、(E_2)、(Y_{12})、(Y_{11})、(Y_{22})、(I_1)、(I_2)均為正值,不難得出,變換器間交互功率(Delta P_{12})的方向僅與(sin(delta_1-delta_2)-sindelta_{12,0})的正負(fù)有關(guān),即故障后功角差相對(duì)于故障前初值的變化僅與(Deltasin(delta_1-delta_2))正負(fù)有關(guān)。若變換器1和2的功角差變化量(Delta(delta_1-delta_2)>0),即故障后變換器1功角加速更多,穩(wěn)定性更差,則(Deltasin(delta_1-delta_2)>0)、(Delta P_{12}>0)、(Delta E_{12}>0),變換器1向變換器2提供交互能量,提高了穩(wěn)定性更差的變換器1的穩(wěn)定性,同時(shí),由于變換器2吸收了變換器提供的交互能量,降低了穩(wěn)定性更好的變換器2的穩(wěn)定性;反之,(Delta E_{12}<0),變換器2向變換器1提供交互能量,同樣提高了穩(wěn)定性更差的變換器2的穩(wěn)定性,降低了穩(wěn)定性更好的變換器1的穩(wěn)定性。暫態(tài)能量交互作用使得兩者穩(wěn)定性趨近一致。
對(duì)于故障后僅變換器2限流的情況,(Delta P_{12})方向主要由(-cos[delta_1-(delta_2+varphi)])決定,其中,(varphi)與限流策略有關(guān)。1)若限流策略為d軸優(yōu)先,即(varphi=0^circ),故障發(fā)生后,變換器2進(jìn)入限流狀態(tài),功角加速更多,穩(wěn)定性更差,(cos(delta_1-delta_2)>0)、(Delta P_{12}<0)、(Delta E_{12}<0),穩(wěn)定性較差的限流變換器向不限流變換器提供交互能量,降低了穩(wěn)定性較好的不限流變換器的穩(wěn)定性,提升了穩(wěn)定性較差的限流變換器的穩(wěn)定性,兩者穩(wěn)定性趨近一致。2)若限流策略為q軸優(yōu)先,即(varphi=90^circ),故障發(fā)生后,變換器2進(jìn)入限流狀態(tài),功角加速更多,穩(wěn)定性更差,(sin(delta_1-delta_2)<0),(Delta P_{12}>0)、(Delta E_{12}>0),穩(wěn)定性較好的不限流變換器向限流變換器提供交互能量,提升了穩(wěn)定性較好的不限流變換器的穩(wěn)定性,降低了穩(wěn)定性較差的限流變換器的穩(wěn)定性;進(jìn)一步地,故障清除后,由于慣性,限流變換器角度將繼續(xù)增加,若臨近失穩(wěn)依然處于限流狀態(tài)或由不限流再次進(jìn)入限流狀態(tài),則限流變換器將加速失穩(wěn)。
由以上分析不難看出,變換器間暫態(tài)交互能量對(duì)并聯(lián)運(yùn)行變換器穩(wěn)定性可能產(chǎn)生2種影響:1)變換器穩(wěn)定性趨近一致,功角變化快的變換器向功角變化慢的變換器提供暫態(tài)能量,使得功角變化快的變換器角度增加放緩,功角變化慢的變換器角度增加加快,最終穩(wěn)定性趨近一致;2)穩(wěn)定性較差的變換器加速失穩(wěn),功角變化慢的變換器向功角變化快的變換器提供暫態(tài)能量,使得功角變化快的變換器角度增加加快,功角變化慢的變換器角度增加放緩,最終穩(wěn)定性較差的變換器將加速失穩(wěn)。以上兩方面體現(xiàn)出暫態(tài)交互能量作用下的功角牽引機(jī)制。該機(jī)制可能使得單機(jī)運(yùn)行時(shí)暫態(tài)失穩(wěn)的變換器在并聯(lián)系統(tǒng)中穩(wěn)定運(yùn)行,也可能使得單機(jī)運(yùn)行穩(wěn)定的變換器在并聯(lián)系統(tǒng)中失去穩(wěn)定,增加了并聯(lián)系統(tǒng)短路故障下暫態(tài)同步穩(wěn)定的不確定性。
從變換器暫態(tài)交互模型可以看出,變換器間耦合功率除受功角影響外,還與端電壓、是否限流以及限流策略相關(guān)。因此,交互功率不一定單向流動(dòng),可能在變換器間循環(huán)往復(fù)、正負(fù)交替出現(xiàn)。暫態(tài)交互能量也在變換器動(dòng)能和勢(shì)能相互轉(zhuǎn)化的過(guò)程中發(fā)揮作用,影響變換器暫態(tài)穩(wěn)定性。因此,首擺相繼失穩(wěn)的2臺(tái)變換器也可能在后續(xù)擺次中由于暫態(tài)交互作用而出現(xiàn)再同步現(xiàn)象。變換器間暫態(tài)交互引起的再同步功角曲線如附錄B圖B1所示。為分析方便,假定初始狀態(tài)(delta_1<delta_2),虛線為(Delta P_{12})對(duì)變換器1電磁功率的影響,A、C點(diǎn)為不穩(wěn)定平衡點(diǎn),B點(diǎn)為穩(wěn)定平衡點(diǎn)。故障發(fā)生后,假定(Delta(delta_1-delta_2)<0),則(Delta P_{12}<0)、變換器1虛擬動(dòng)能增加,如圖中紅色區(qū)域所示,故障清除后,(Delta P_{12})仍然小于0、(delta_1)繼續(xù)加速,越過(guò)E點(diǎn)后(Delta(delta_1-delta_2)>0),(Delta P_{12}>0)、(Delta P_{12})增加部分勢(shì)能如圖中藍(lán)色區(qū)域所示。若進(jìn)入某個(gè)失步周期時(shí),變換器1勢(shì)能恰好能夠?qū)?dòng)能全部轉(zhuǎn)化,則變換器1將實(shí)現(xiàn)再同步[20]。
3 并聯(lián)系統(tǒng)的穩(wěn)定域
3.1 穩(wěn)定域構(gòu)建
由于構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)等效方程中含有能量耗散的阻尼項(xiàng),基于能量函數(shù)求解暫態(tài)穩(wěn)定域的直接方法都存在一定程度的保守性。相比之下,通過(guò)微分幾何流形穩(wěn)定性理論,可以獲得一個(gè)保守性較小的穩(wěn)定區(qū)域。根據(jù)流形穩(wěn)定性理論[31],動(dòng)力學(xué)系統(tǒng)中,不穩(wěn)定平衡點(diǎn)的穩(wěn)定流形構(gòu)成穩(wěn)定域邊界,并將相平面劃分了2個(gè)區(qū)域,即穩(wěn)定區(qū)域和不穩(wěn)定區(qū)域,遠(yuǎn)離不穩(wěn)定平衡點(diǎn)的流形稱為不穩(wěn)定流形,逼近不穩(wěn)定平衡點(diǎn)的流形稱為穩(wěn)定流形。通過(guò)判斷故障后運(yùn)行點(diǎn)位于穩(wěn)定域內(nèi)或外,可得到故障后變換器的穩(wěn)定狀態(tài),穩(wěn)定域面積的大小代表了變換器穩(wěn)定性的強(qiáng)弱。本文即利用數(shù)值方法求取并聯(lián)變換器穩(wěn)定域,具體做法是對(duì)不穩(wěn)定平衡點(diǎn)在穩(wěn)定流形方向求反時(shí)間積分。
2臺(tái)變換器并聯(lián)系統(tǒng)包含(delta_1)、(delta_2)、(Deltaomega_1)、(Deltaomega_2)這4個(gè)狀態(tài)變量,這些狀態(tài)變量構(gòu)成的四維空間不利于觀察和分析穩(wěn)定域邊界。由前文分析可知,2臺(tái)構(gòu)網(wǎng)型變換器間暫態(tài)交互能量的功角牽引機(jī)制作用,促使2臺(tái)變換器穩(wěn)定性趨近一致或穩(wěn)定性較差變換器加速失穩(wěn)。因此,同一場(chǎng)站內(nèi)并聯(lián)運(yùn)行的變換器間相對(duì)失穩(wěn)不是研究重點(diǎn),更應(yīng)關(guān)注的是變換器相對(duì)外部系統(tǒng)的穩(wěn)定性問(wèn)題。由此,采用向單變換器(Deltaomega-delta)構(gòu)成的二維平面投影方式對(duì)并聯(lián)系統(tǒng)進(jìn)行狀態(tài)變量降維,得到任一變換器的運(yùn)動(dòng)相圖,通過(guò)投影方式得到的變換器運(yùn)動(dòng)軌跡即反映了變換器暫態(tài)交互對(duì)穩(wěn)定性的影響。
故障消失后系統(tǒng)恢復(fù)過(guò)程中,變換器暫態(tài)限流環(huán)節(jié)會(huì)在動(dòng)作和不動(dòng)作之間切換,故需計(jì)及構(gòu)網(wǎng)型變換器限流切換控制構(gòu)建并聯(lián)系統(tǒng)穩(wěn)定域。需要注意的是,根據(jù)2臺(tái)變換器故障后是否限流,存在以下4種情況:均不限流、僅變換器1限流、僅變換器2限流、均限流。因此,通過(guò)假定故障后限流器運(yùn)行狀態(tài)可以得到并聯(lián)系統(tǒng)在一個(gè)周期內(nèi)的4個(gè)UEP。但假定的限流狀態(tài)必須與實(shí)際的電流值吻合才是合理的。因此,分別計(jì)算各UEP變換器輸出電流,判斷變換器實(shí)際所屬限流狀態(tài),進(jìn)而剔除不合理的UEP,保留合理的UEP。在UEP進(jìn)行反時(shí)間積分,積分過(guò)程中逐點(diǎn)判斷變換器所處的運(yùn)行狀態(tài),根據(jù)運(yùn)行狀態(tài)對(duì)暫態(tài)交互模型進(jìn)行模型切換,進(jìn)而得到計(jì)及切換控制的穩(wěn)定域。下文結(jié)合實(shí)際計(jì)算結(jié)果進(jìn)行說(shuō)明。
為分析簡(jiǎn)便,假定2臺(tái)變換器參數(shù)完全相同,限流幅值均為1.5 p.u.,即變換器間無(wú)暫態(tài)交互,2臺(tái)變換器限流狀態(tài)相同。圖5為通過(guò)投影降維方式得到的計(jì)及限流切換的變換器穩(wěn)定域。圖中:(SEP_1)和(SEP_2)分別為不限流和限流變換器穩(wěn)定平衡點(diǎn);(UEP_1)和(UEP_2)分別為限流變換器的不穩(wěn)定平衡點(diǎn);(UEP_3)為不限流變換器的不穩(wěn)定平衡點(diǎn);A、(A')、(B')為限流與不限流狀態(tài)的切換點(diǎn)。通過(guò)在不穩(wěn)定平衡點(diǎn)進(jìn)行反時(shí)間積分,可以得到一個(gè)周期內(nèi)變換器限流穩(wěn)定域和不限流穩(wěn)定域,分別如圖5中紅色曲線包圍的S1區(qū)域和青色曲線包圍的S2區(qū)域所示。計(jì)及切換控制,如圖5中橙色箭頭所示,從限流狀態(tài)(UEP_2)出發(fā)反時(shí)間積分,首先到達(dá)青色和紅色曲線的交點(diǎn),但因?yàn)樵擖c(diǎn)仍然位于限流區(qū)域,所以會(huì)沿著限流的軌跡紅色曲線繼續(xù)反時(shí)間運(yùn)動(dòng)到達(dá)A點(diǎn),在A點(diǎn)左側(cè)區(qū)域,變換器電流不越限,切換到不限流軌跡(藍(lán)色曲線)繼續(xù)反時(shí)間積分,到達(dá)(A')點(diǎn),再次切換到限流軌跡(褐色曲線),直到達(dá)到(B')點(diǎn),此時(shí)電流不再越限,再次切換到不限流軌跡(綠色曲線)繼續(xù)反時(shí)間積分。由此得到計(jì)及限流切換的系統(tǒng)穩(wěn)定域如圖5中灰色區(qū)域所示。故障后系統(tǒng)穩(wěn)定運(yùn)行點(diǎn)若落在灰色區(qū)域內(nèi),則最終會(huì)運(yùn)動(dòng)到(SEP_1)。可以看出,計(jì)及限流切換后,系統(tǒng)穩(wěn)定域邊界由不同軌跡線構(gòu)成,與限流穩(wěn)定域與不限流穩(wěn)定域存在顯著差別。下節(jié)將利用本文提出的并聯(lián)系統(tǒng)穩(wěn)定域構(gòu)建方法分析計(jì)及暫態(tài)交互后變換器運(yùn)行狀態(tài)及參數(shù)對(duì)暫態(tài)同步穩(wěn)定性的影響。計(jì)及限流切換的構(gòu)網(wǎng)型并聯(lián)系統(tǒng)穩(wěn)定域構(gòu)建步驟如附錄B圖B2所示。
圖5 計(jì)及限流切換的并聯(lián)系統(tǒng)穩(wěn)定域
Fig.5 Stability domain of parallel system considering current limiting switching
3.2 穩(wěn)定性影響因素分析
由變換器暫態(tài)交互模型可知,暫態(tài)交互能量大小和方向受變換器運(yùn)行點(diǎn)、控制參數(shù)、并網(wǎng)阻抗、限流值大小等因素影響,進(jìn)而影響并聯(lián)系統(tǒng)穩(wěn)定性。本節(jié)以故障后僅1臺(tái)變換器限流為例,利用穩(wěn)定域方法分析限流變換器運(yùn)行狀態(tài)及參數(shù)變化對(duì)不限流變換器穩(wěn)定性的影響。設(shè)置變換器2電流限幅值為1.5 p.u.,限流策略分別考慮d軸優(yōu)先和q軸優(yōu)先,變換器1不設(shè)電流限幅。下文給出的是變換器1穩(wěn)定域的變化。需要說(shuō)明的是,在工程應(yīng)用中,應(yīng)分別作出所有變換器的穩(wěn)定域,進(jìn)而評(píng)估并聯(lián)系統(tǒng)整體的穩(wěn)定性。
3.2.1 初始運(yùn)行點(diǎn)的影響
設(shè)置場(chǎng)景1中(P_{1ref}=P_{2ref}=0.5) p.u.,對(duì)比場(chǎng)景2中(P_{1ref}=0.5) p.u.、(P_{2ref}=1.0) p.u.,其余參數(shù)相同。對(duì)于場(chǎng)景1,變換器間不存在交互能量;對(duì)于場(chǎng)景2,故障后限流變換器2向不限流變換器1提供交互能量,隨變換器2初始出力增加,穩(wěn)定性更差,故障后功角加速更多,(delta_1-delta_2)絕對(duì)值更大,(cos(delta_1-delta_2))更小,故暫態(tài)交互能量更小,不限流變換器穩(wěn)定域擴(kuò)大,穩(wěn)定性提升。q軸優(yōu)先策略下,場(chǎng)景2不限流變換器1向限流變換器2提供交互能量,隨變換器2初始出力增加,穩(wěn)定性更差,故障后功角加速更多,(delta_1-delta_2)為負(fù),且絕對(duì)值更大,(sin(delta_1-delta_2))更小,故暫態(tài)交互能量減小,不限流變換器穩(wěn)定域縮小,穩(wěn)定性降低,圖6(a)和(b)所示穩(wěn)定域計(jì)算結(jié)果與上述分析結(jié)論一致。
3.2.2 并網(wǎng)阻抗的影響
(P_{1ref}=P_{2ref}=0.5) p.u.,設(shè)置場(chǎng)景1中變換器并網(wǎng)阻抗(X_1=X_2=0.05) p.u.,對(duì)比場(chǎng)景2中(X_1=0.05) p.u.、(X_2=0.07) p.u.,其余參數(shù)相同。對(duì)于場(chǎng)景1,變換器間不存在交互能量;對(duì)于場(chǎng)景2,故障后限流變換器2向不限流變換器1提供交互能量,隨著變換器2并網(wǎng)阻抗增加,穩(wěn)定性更差,(delta_1-delta_2)絕對(duì)值更大,(cos(delta_1-delta_2))更小,故暫態(tài)交互能量更小,不限流變換器穩(wěn)定域擴(kuò)大,穩(wěn)定性提升。q軸優(yōu)先策略下,場(chǎng)景2不限流變換器1向限流變換器2提供交互能量,隨變換器2初始出力增加,穩(wěn)定性更差,故障后功角加速更多,(delta_1-delta_2)為負(fù),且絕對(duì)值更大,(sin(delta_1-delta_2))更小,故暫態(tài)交互能量減小,不限流變換器穩(wěn)定域縮小,穩(wěn)定性降低。圖6(c)和(d)所示穩(wěn)定域計(jì)算結(jié)果與上述分析結(jié)論一致。
值得注意的是,對(duì)于實(shí)際的新能源場(chǎng)站而言,站內(nèi)阻抗分布不均,實(shí)際上不同位置變換器的并網(wǎng)阻抗不同,這種差異雖不會(huì)導(dǎo)致變換器間相對(duì)失穩(wěn),但相對(duì)功角產(chǎn)生的暫態(tài)交互能量將對(duì)變換器暫態(tài)同步穩(wěn)定性產(chǎn)生影響。限流變換器的并網(wǎng)阻抗越大,故障后其穩(wěn)定性越差,但將使得不限流變換器的穩(wěn)定性越好,這其實(shí)也體現(xiàn)了前文所提功角牽引機(jī)制的第2種情形。
3.2.3 變換器慣量參數(shù)的影響
(P_{1ref}=P_{2ref}=0.5) p.u.,設(shè)置場(chǎng)景1中(J_1=J_2=5) s,對(duì)比場(chǎng)景2中(J_1=5) s、(J_2=8) s,其余參數(shù)相同。對(duì)于場(chǎng)景1,變換器間不存在交互能量;對(duì)于場(chǎng)景2,變換器2慣量增加,故障后加速更慢,即(delta_1-delta_2>0),d軸優(yōu)先策略下,(cos(delta_1-delta_2)>0)、(Delta P_{12}<0)、(Delta E_{12}<0),故障后限流變換器2向不限流變換器1提供交互能量,隨著慣量增加,(cos(delta_1-delta_2))更小,故暫態(tài)交互能量更小,不限流變換器穩(wěn)定域擴(kuò)大,穩(wěn)定性提升。q軸優(yōu)先策略下,場(chǎng)景2有(delta_1-delta_2)為正,且隨慣量增加,(delta_1-delta_2)的絕對(duì)值更大,(sin(delta_1-delta_2))更大,有(sin(delta_1-delta_2)>0)、(Delta P_{12}<0)、(Delta E_{12}<0),故障后限流變換器2向不限流變換器1提供交互能量更小,不限流變換器穩(wěn)定域縮小,穩(wěn)定性下降。圖6(e)和(f)所示穩(wěn)定域計(jì)算結(jié)果與上述分析結(jié)論一致。
圖6 運(yùn)行狀態(tài)及參數(shù)對(duì)穩(wěn)定域的影響
Fig.6 Influence of operating status and parameters on stability domain
綜上所述,限流變換器初始運(yùn)行點(diǎn)、并網(wǎng)阻抗、控制參數(shù)等因素對(duì)不限流變換器暫態(tài)穩(wěn)定性產(chǎn)生影響。從上述分析看出,d軸電流優(yōu)先策略下,限流變換器初始運(yùn)行功率越高,并網(wǎng)阻抗越大,慣量參數(shù)越大,越有利于不限流變換器的暫態(tài)穩(wěn)定性。q軸電流優(yōu)先策略則相反。
4 仿真驗(yàn)證
為了驗(yàn)證上述理論分析的正確性,基于PSCAD/EMTDC構(gòu)建了如圖1所示的2臺(tái)構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)時(shí)域仿真模型。仿真參數(shù)如附錄C表C1所示。本文通過(guò)電網(wǎng)電壓的對(duì)稱跌落模擬電網(wǎng)發(fā)生三相對(duì)稱短路故障,故障設(shè)置為3.0 s時(shí)電網(wǎng)電壓跌落至0.05 p.u.。
4.1 暫態(tài)交互模型有效性驗(yàn)證
對(duì)構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)電磁暫態(tài)詳細(xì)模型與本文構(gòu)建的暫態(tài)交互模型進(jìn)行仿真對(duì)比。3.0 s時(shí)系統(tǒng)側(cè)發(fā)生三相短路故障,3.5 s故障消失。變換器1不設(shè)置電流限幅,變換器2限流策略為d軸優(yōu)先,限幅值為1.5 p.u.。附錄C圖C1給出了變換器1、變換器2以及變換器間交互有功功率曲線。3.0 s故障發(fā)生后,變換器2切換至限流控制模式,交互功率由變換器2流向變換器1,3.5 s故障消失后,系統(tǒng)電壓迅速恢復(fù),變換器2仍處于限流狀態(tài),直到3.83 s,變換器2從限流狀態(tài)恢復(fù)。從圖中可以看出,僅在故障發(fā)生、消失以及限流切換的數(shù)十毫秒內(nèi)存在差別,其余時(shí)段詳細(xì)模型計(jì)算結(jié)果與交互模型完全吻合,滿足百毫秒時(shí)間尺度暫態(tài)同步穩(wěn)定問(wèn)題的研究需要。
4.2 暫態(tài)交互能量的牽引機(jī)制驗(yàn)證
4.2.1 同步穩(wěn)定
設(shè)置(P_{1ref}=1.0) p.u.、(P_{2ref}=0.5) p.u.,2臺(tái)變換器均不限流。3.0 s時(shí)發(fā)生短路故障,持續(xù)時(shí)間為0.19 s,2臺(tái)變換器單獨(dú)運(yùn)行和并聯(lián)運(yùn)行時(shí)的虛擬功角變化分別如附錄C圖C2(a)和(b)所示。可以看出,2臺(tái)變換器單獨(dú)運(yùn)行時(shí),變換器1失穩(wěn),變換器2穩(wěn)定。2臺(tái)變換器并聯(lián)運(yùn)行時(shí),暫態(tài)能量由變換器1流向變換器2,如附錄C圖C3所示。暫態(tài)能量交互提升了變換器1的穩(wěn)定性,變換器2功角首擺幅度增加,但擾動(dòng)后2臺(tái)變換器均趨于穩(wěn)定,并聯(lián)系統(tǒng)暫態(tài)穩(wěn)定性提高。
4.2.2 相繼失穩(wěn)
設(shè)置(P_{1ref}=1.0) p.u.、(P_{2ref}=0.8) p.u.,2臺(tái)變換器均不限流。3.0 s時(shí)發(fā)生短路故障,持續(xù)時(shí)間為0.24 s,2臺(tái)變換器單獨(dú)運(yùn)行和并聯(lián)運(yùn)行時(shí)的虛擬功角變化分別如附錄C圖C4(a)和(b)所示。可以看出,2臺(tái)變換器單獨(dú)運(yùn)行時(shí),變換器1失穩(wěn),變換器2穩(wěn)定。2臺(tái)變換器并聯(lián)運(yùn)行時(shí),暫態(tài)能量由變換器1流向變換器2,并且隨時(shí)間持續(xù)增加,暫態(tài)交互能量逐漸增大,如附錄C圖C5所示。暫態(tài)能量交互降低了變換器2的穩(wěn)定性,擾動(dòng)后2臺(tái)變換器相繼失穩(wěn),并聯(lián)系統(tǒng)暫態(tài)穩(wěn)定性下降。
4.2.3 再同步
設(shè)置(P_{1ref}=1.0) p.u.、(P_{2ref}=0.5) p.u.,2臺(tái)變換器均不限流。3.0 s時(shí)發(fā)生短路故障,持續(xù)時(shí)間為0.29 s,2臺(tái)變換器單獨(dú)運(yùn)行和并聯(lián)運(yùn)行時(shí)的虛擬功角變化分別如附錄C圖C6(a)和(b)所示。可以看出,2臺(tái)變換器單獨(dú)運(yùn)行時(shí),變換器1失穩(wěn),變換器2穩(wěn)定。2臺(tái)變換器并聯(lián)運(yùn)行時(shí),暫態(tài)能量由變換器1流向變換器2,如附錄C圖C7所示。其中,3.00~3.94 s期間,變換器1流向變換器2暫態(tài)能量增加,變換器2隨變換器1首擺失穩(wěn),3.94~4.31 s期間,變換器1流向變換器2的暫態(tài)能量減少,變換器2和變換器1的加速動(dòng)能被勢(shì)能完全轉(zhuǎn)化,變換器在第2擺恢復(fù)穩(wěn)定,實(shí)現(xiàn)了再同步。
4.2.4 加速失穩(wěn)
設(shè)置(P_{1ref}=1.0) p.u.、(P_{2ref}=1.8) p.u.,變換器2限流值為1.5 p.u.、q軸優(yōu)先。3.0 s時(shí)發(fā)生短路故障,持續(xù)時(shí)間為0.22 s,2臺(tái)變換器單獨(dú)運(yùn)行和并聯(lián)運(yùn)行時(shí)的虛擬功角變化分別如圖7(a)和(b)所示。可以看出,2臺(tái)變換器單獨(dú)運(yùn)行時(shí),2臺(tái)變換器均穩(wěn)定,并聯(lián)運(yùn)行時(shí)變換器2失穩(wěn)。圖7(c)為暫態(tài)交互能量和變換器2限流環(huán)節(jié)動(dòng)作信號(hào),圖7(d)為變換器2輸出電流曲線。從圖中可以看出,3.0 s故障發(fā)生后,變換器2限流環(huán)節(jié)動(dòng)作,交互能量由不限流變換器1流向限流變換器2,導(dǎo)致變換器2功角增加更為迅速;故障消失后,變換器2仍處于限流狀態(tài),功角持續(xù)加大,期間變換器2相對(duì)系統(tǒng)失穩(wěn)。可見(jiàn),變換器間交互的暫態(tài)能量導(dǎo)致了限流變換器加速失穩(wěn)。
圖7 變換器2加速失穩(wěn)仿真結(jié)果
Fig.7 Simulation results of accelerated instability of converter 2
4.3 并聯(lián)系統(tǒng)穩(wěn)定域驗(yàn)證
4.3.1 不計(jì)限流切換
通過(guò)計(jì)算臨近穩(wěn)定邊界的相軌跡驗(yàn)證穩(wěn)定域的正確性。設(shè)置(P_{1ref}=1.0) p.u.、(P_{2ref}=0.5) p.u.,3.0 s時(shí)發(fā)生短路故障,通過(guò)不斷延長(zhǎng)故障切除時(shí)間,相軌跡將逐漸遠(yuǎn)離穩(wěn)定域,持續(xù)時(shí)間為0.28 s和0.30 s的相軌跡及穩(wěn)定域如附錄C圖C8所示。圖中:SEP為變換器1初始運(yùn)行點(diǎn),發(fā)生三相接地故障后,系統(tǒng)運(yùn)行狀態(tài)從SEP開(kāi)始沿綠色曲線移動(dòng)。若在0.28 s切除故障,則系統(tǒng)狀態(tài)由穩(wěn)定域內(nèi)(B_1)點(diǎn)沿綠色曲線重新回到SEP;若0.30 s后切除故障,則系統(tǒng)狀態(tài)由穩(wěn)定域外(B_2)點(diǎn)沿紅色曲線失穩(wěn)。變換器1穩(wěn)定域與仿真計(jì)算結(jié)果吻合。
4.3.2 計(jì)及限流切換
設(shè)置(P_{1ref}=1.0) p.u.、(P_{2ref}=0.5) p.u.,變換器限流值均為1.5 p.u.。3.0 s時(shí)發(fā)生短路故障,通過(guò)不斷延長(zhǎng)故障切除時(shí)間,相軌跡將逐漸遠(yuǎn)離穩(wěn)定域,持續(xù)時(shí)間為0.22 s和0.23 s的相軌跡及穩(wěn)定域如圖8所示。圖中:灰色區(qū)域即為穩(wěn)定域,其邊界軌跡線含義與圖5相同。發(fā)生三相接地故障后,系統(tǒng)運(yùn)行狀態(tài)從SEP開(kāi)始沿綠色曲線移動(dòng)。若在0.22 s切除故障,則系統(tǒng)狀態(tài)由穩(wěn)定域內(nèi)(B_1)點(diǎn)沿綠色曲線重新回到平衡點(diǎn),若0.23 s后切除故障,則系統(tǒng)狀態(tài)由穩(wěn)定域外(B_2)點(diǎn)沿紫色曲線失穩(wěn)。考慮限流切換后的變換器1穩(wěn)定域與仿真計(jì)算結(jié)果吻合。
圖8 系統(tǒng)運(yùn)行相軌跡與穩(wěn)定域
Fig.8 Phase trajectory and stability domain of system operation
4.4 穩(wěn)定性影響因素驗(yàn)證
以僅1臺(tái)變換器限流情況為例進(jìn)行穩(wěn)定性影響因素驗(yàn)證。變換器2限流值為1.5 p.u.,限流策略分別考慮d軸優(yōu)先和q軸優(yōu)先。變換器1設(shè)置為不限流。
4.4.1 初始運(yùn)行點(diǎn)的影響驗(yàn)證
設(shè)置(P_{1ref}=0.5) p.u.,(P_{2ref})分別設(shè)置為0.5、0.8、1.0 p.u.。3.0 s時(shí)發(fā)生三相接地短路故障,故障持續(xù)時(shí)間為0.1 s。附錄C圖C9給出了d軸優(yōu)先策略下,變換器1虛擬功角變化和暫態(tài)交互能量變化。d軸優(yōu)先策略下,交互能量由限流變換器2流向不限流變換器1。隨著變換器2出力增加,暫態(tài)交互能量減小,有利于不限流變換器的穩(wěn)定性。
附錄C圖C10給出了q軸優(yōu)先策略下,變換器1虛擬功角變化和暫態(tài)交互能量變化。q軸優(yōu)先策略下,交互能量由不限流變換器1流向限流變換器2。隨著變換器2出力增加,暫態(tài)交互能量減小,不利于不限流變換器穩(wěn)定性。
附錄C圖C11為q軸優(yōu)先策略下變換器間交互能量與變換器2限流動(dòng)作信號(hào)。從圖中可以看出,僅故障期間限流環(huán)節(jié)動(dòng)作,該時(shí)段交互能量由不限流變換器1流向限流變換器2,有利于變換器的穩(wěn)定;故障消失后,限流環(huán)節(jié)不再動(dòng)作,交互能量開(kāi)始反向流動(dòng),不利于變換器1的穩(wěn)定。與2.2節(jié)分析結(jié)論一致。
4.4.2 并網(wǎng)阻抗的影響驗(yàn)證
本節(jié)驗(yàn)證限流變換器并網(wǎng)阻抗變化對(duì)不限流變換器穩(wěn)定性的影響。設(shè)置(P_{1ref}=P_{2ref}=1.0) p.u.,(X_1=0.05) p.u.,分別設(shè)置(X_2)為0.05、0.10、0.15 p.u.。3.0 s時(shí)發(fā)生三相接地短路故障,故障持續(xù)時(shí)間為0.1 s。附錄C圖C12給出了d軸優(yōu)先策略下變換器1虛擬功角變化和暫態(tài)交互能量變化。可以看出,d軸優(yōu)先策略下,隨著變換器2阻抗增加,擾動(dòng)后由變換器2流向變換器1的交互能量減小,變換器1的暫態(tài)穩(wěn)定性提高。q軸優(yōu)先策略下則相反,如附錄C圖C13所示。
4.4.3 變換器慣量參數(shù)的影響驗(yàn)證
設(shè)置(P_{1ref}=P_{2ref}=1.0) p.u.,(J_1=5) s,分別設(shè)置(J_2)為5、8、10 s。3.0 s時(shí)發(fā)生三相接地短路故障,故障持續(xù)時(shí)間為0.1 s。d軸優(yōu)先策略下,擾動(dòng)后隨著變換器2慣量增加,由變換器2流向變換器1的暫態(tài)交互能量減少,變換器1暫態(tài)穩(wěn)定性得到提高,如附錄C圖C14所示。q軸優(yōu)先策略則相反,如附錄C圖C15所示。
上述仿真結(jié)果與前文基于穩(wěn)定域的運(yùn)行狀態(tài)及參數(shù)對(duì)暫態(tài)同步穩(wěn)定性影響的分析結(jié)果一致。
5 實(shí)驗(yàn)驗(yàn)證
為進(jìn)一步驗(yàn)證本文所提暫態(tài)穩(wěn)定方法以及參數(shù)影響分析的正確性,基于RTDS平臺(tái)構(gòu)建了包含2臺(tái)構(gòu)網(wǎng)型變換器控制器的硬件在環(huán)實(shí)驗(yàn)平臺(tái),如附錄D圖D1所示,該實(shí)驗(yàn)平臺(tái)由RTDS實(shí)時(shí)仿真器、2臺(tái)構(gòu)網(wǎng)型變換器控制器、I/O板卡構(gòu)成。電網(wǎng)一次系統(tǒng)、變換器主電路以及大擾動(dòng)故障均通過(guò)RTDS實(shí)時(shí)仿真器模擬,變換器控制器輸出脈沖信號(hào)返回至RTDS。系統(tǒng)參數(shù)如附錄C表C1所示。變換器1不設(shè)置電流限幅,變換器2電流限幅策略為d軸優(yōu)先,限幅值為1.5 p.u.。故障設(shè)置為10 s時(shí)電網(wǎng)電壓跌落至0.05 p.u.,持續(xù)時(shí)間為0.2 s。通過(guò)調(diào)整變換器1并網(wǎng)阻抗和慣量參數(shù),使得2臺(tái)變換器間交互能量發(fā)生變化,進(jìn)一步對(duì)比參數(shù)調(diào)整前后2臺(tái)變換器功角曲線以及穩(wěn)定性變化情況,驗(yàn)證本文分析結(jié)論。
5.1 并網(wǎng)阻抗影響實(shí)驗(yàn)
參數(shù)調(diào)整前的實(shí)驗(yàn)波形如圖9所示。圖中:從上到下依次為參數(shù)調(diào)整前變換器1功角曲線、變換器2功角曲線以及變換器2限流動(dòng)作信號(hào)。可以看出,故障后變換器2觸發(fā)限流動(dòng)作,功角增加,d軸優(yōu)先策略使得交互能量由變換器1流向變換器2,變換器2加速失穩(wěn)。
圖9 參數(shù)調(diào)整前的實(shí)驗(yàn)波形
Fig.9 Experimental waveforms before parameter adjustment
增加變換器1并網(wǎng)阻抗,設(shè)置為(X_1)為0.08 p.u.。參數(shù)調(diào)整后,故障下變換器1功角增加變快,降低了由變換器1流向變換器2的交互能量,雖然惡化了不限流變換器1的穩(wěn)定性,但是提升了限流變換器2的穩(wěn)定性,最終2臺(tái)變換器相對(duì)系統(tǒng)均暫態(tài)穩(wěn)定,如圖10所示。實(shí)驗(yàn)結(jié)果與前文理論分析結(jié)論一致。
圖10 阻抗參數(shù)調(diào)整后的實(shí)驗(yàn)波形
Fig.10 Experimental waveforms after impedance parameter adjustment
5.2 變換器慣量參數(shù)影響實(shí)驗(yàn)
仍然采用附錄C表C1所示系統(tǒng)參數(shù),實(shí)驗(yàn)波形見(jiàn)圖9。減小變換器1慣量參數(shù),使得故障后變換器1功角增加變快,同樣降低了由變換器1流向變換器2的交互能量,惡化了不限流變換器1的穩(wěn)定性,但是提升了限流變換器2的穩(wěn)定性,2臺(tái)變換器相對(duì)系統(tǒng)也暫態(tài)穩(wěn)定,如圖11所示。實(shí)驗(yàn)結(jié)果與前文理論分析結(jié)論一致。
圖11 慣量參數(shù)調(diào)整后的實(shí)驗(yàn)波形
Fig.11 Experimental waveforms after inertia parameter adjustment
6 結(jié)語(yǔ)
本文通過(guò)建立構(gòu)網(wǎng)型變換器并聯(lián)運(yùn)行暫態(tài)交互模型,揭示了暫態(tài)交互能量對(duì)變換器穩(wěn)定性的影響機(jī)理,發(fā)現(xiàn)了暫態(tài)交互能量的功角牽引機(jī)制對(duì)變換器穩(wěn)定性的2種影響,通過(guò)構(gòu)建計(jì)及限流切換的構(gòu)網(wǎng)型變換器并聯(lián)系統(tǒng)穩(wěn)定域,分析了運(yùn)行狀態(tài)和參數(shù)變化對(duì)穩(wěn)定性的影響規(guī)律,并進(jìn)行了仿真和實(shí)驗(yàn)驗(yàn)證。主要結(jié)論如下:
1) 短路故障下,構(gòu)網(wǎng)型變換器間存在交互能量的流動(dòng),并對(duì)變換器暫態(tài)穩(wěn)定性產(chǎn)生影響。交互能量的大小和流動(dòng)方向主要由變換器相對(duì)功角以及限流策略決定。
2) 由于暫態(tài)交互能量的影響,存在單機(jī)運(yùn)行時(shí)暫態(tài)失穩(wěn)的變換器在并聯(lián)系統(tǒng)中穩(wěn)定運(yùn)行,或單機(jī)運(yùn)行穩(wěn)定的變換器在并聯(lián)系統(tǒng)中失去穩(wěn)定,或首擺失穩(wěn)后再同步的現(xiàn)象,增加了并聯(lián)系統(tǒng)短路故障下暫態(tài)同步穩(wěn)定的不確定性。
3) 發(fā)現(xiàn)交互能量作用下變換器間存在功角牽引機(jī)制,該機(jī)制將促使多變換器穩(wěn)定性趨近一致或致使穩(wěn)定性較差的變換器加速失穩(wěn)。
4) 提出的計(jì)及限流切換的并聯(lián)系統(tǒng)穩(wěn)定域降維構(gòu)建方法能夠直觀反映運(yùn)行狀態(tài)及參數(shù)變化對(duì)暫態(tài)穩(wěn)定性的影響,可以為并聯(lián)系統(tǒng)運(yùn)行狀態(tài)調(diào)整及控制參數(shù)優(yōu)化提供指導(dǎo)。采用d軸優(yōu)先的電流限幅策略,限流變換器初始運(yùn)行功率越高,并網(wǎng)阻抗越大,慣量參數(shù)越大,越有利于不限流變換器的暫態(tài)穩(wěn)定性。q軸優(yōu)先的電流限幅策略則相反。
本文以兩構(gòu)網(wǎng)型變換器并聯(lián)接入理想電源系統(tǒng)為研究對(duì)象,分析結(jié)論適用于故障下變換器相位超前于理想電源的場(chǎng)景。需要注意的是,在多機(jī)系統(tǒng)中,尤其是多構(gòu)網(wǎng)型變換器與同步發(fā)電機(jī)混聯(lián)系統(tǒng)中,其暫態(tài)過(guò)程更為復(fù)雜,變換器與同步發(fā)電機(jī)相位的超前滯后關(guān)系可能導(dǎo)致分析結(jié)論完全相反,需要進(jìn)一步研究。同時(shí),如何協(xié)同控制多臺(tái)構(gòu)網(wǎng)型變換器提升并聯(lián)系統(tǒng)暫態(tài)同步穩(wěn)定性也將是下一步研究的重點(diǎn)。
參考文獻(xiàn)
[1] 國(guó)家能源局發(fā)布2023年全國(guó)電力工業(yè)統(tǒng)計(jì)數(shù)據(jù)[EB/OL]. (2024-01-16)[2024-04-20]. https://www.nea.gov.cn/2024-01/26/c_1310762246.htm. National Energy Administration releases statistical data on the national power industry for 2023[EB/OL]. (2024-01-16)[2024-04-20]. https://www.nea.gov.cn/2024-01/26/c_1310762246.htm.
[2] 新型電力系統(tǒng)發(fā)展藍(lán)皮書(shū)[M]. 北京: 中國(guó)電力出版社, 2023. Blue book of new power system development[M]. Beijing: China Electric Power Press, 2023.
[3] 孫華東, 徐式蘊(yùn), 許濤, 等. 電力系統(tǒng)安全穩(wěn)定性的定義與分類探析[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2022, 42(21): 7796-7809. SUN Huadong, XU Shiyun, XU Tao, et al. Research on definition and classification of power system security and stability[J]. Proceedings of the CSEE, 2022, 42(21): 7796-7809.
[4] 熊佳旺, 孔力, 葉華, 等. 弱電網(wǎng)中鎖相環(huán)型并網(wǎng)變換器非線性暫態(tài)穩(wěn)定解析分析[J]. 電力系統(tǒng)自動(dòng)化, 2022, 46(24): 76-84. XIONG Jiawang, KONG Li, YE Hua, et al. Analytical analysis on nonlinear transient stability of phase-locked loop type grid connected converter in weak power grid[J]. Automation of Electric Power Systems, 2022, 46(24): 76-84.
[5] 許詰翊, 劉威, 劉樹(shù), 等. 電力系統(tǒng)變流器構(gòu)網(wǎng)控制技術(shù)的現(xiàn)狀與發(fā)展趨勢(shì)[J]. 電網(wǎng)技術(shù), 2022, 46(9): 3586-3595. XU Jieyi, LIU Wei, LIU Shu, et al. Current state and development trends of power system converter grid-forming control technology[J]. Power System Technology, 2022, 46(9): 3586-3595.
[6] ROSSO R, WANG X, LISERRE M, et al. Grid-forming converters: control approaches, grid-synchronization, and future trends-a review[J]. IEEE Open Journal of Industry Applications, 2021, 2: 93-109.
[7] ZHANG H B, XIANG W, LIN W X, et al. Grid forming converters in renewable energy sources dominated power grid: control strategy, stability, application, and challenges[J]. Journal of Modern Power Systems and Clean Energy, 2021, 9(6): 1239-1256.
[8] WU H, RUAN X B, YANG D S, et al. Small-signal modeling and parameters design for virtual synchronous generators[J]. IEEE Transactions on Industrial Electronics, 2016, 63(7): 4292-4303.
[9] ROSSO R, ENGELKEN S, LISERRE M. On the implementation of an FRT strategy for grid-forming converters under symmetrical and asymmetrical grid faults[J]. IEEE Transactions on Industry Applications, 2021, 57(5): 4385-4397.
[10] 王盼寶, 王鵬, 李珅光, 等. 電網(wǎng)故障下構(gòu)網(wǎng)型逆變器動(dòng)態(tài)限流控制策略[J]. 高電壓技術(shù), 2022, 48(10): 3829-3837. WANG Panbao, WANG Peng, LI Shenguang, et al. Dynamic current-limiting control strategy of grid-forming inverter under grid faults[J]. High Voltage Engineering, 2022, 48(10): 3829-3837.
[11] WU H, WANG X F. Design-oriented transient stability analysis of grid-connected converters with power synchronization control[J]. IEEE Transactions on Industrial Electronics, 2019, 66(8): 6473-6482.
[12] HU P F, JIANG W T, YU Y X, et al. Transient stability improvement of grid-forming voltage source converters considering current limitation[J]. Sustainable Energy Technologies and Assessments, 2022, 54: 102839.
[13] LIU T, WANG X F. Transient stability of single-loop voltage-magnitude controlled grid-forming converters[J]. IEEE Transactions on Power Electronics, 2021, 36(6): 6158-6162.
[14] ROKROK E, QORIA T, BRUYERE A, et al. Transient stability assessment and enhancement of grid-forming converters embedding current reference saturation as current limiting strategy[J]. IEEE Transactions on Power Systems, 2022, 37(2): 1519-1531.
[15] 蒙昌鑫, 王延旭, 王威儒, 等. 跟網(wǎng)/構(gòu)網(wǎng)控制交互下?lián)Q流器中頻特性分析及振蕩抑制[J/OL]. 電力系統(tǒng)自動(dòng)化[2024-09-27]. https://kns.cnki.net/kcms/detail/32.1180.TP.20240920.1148.003.html. MENG Changxin, WANG Yanxu, WANG Weiru, et al. Medium-frequency characteristic analysis and oscillation suppression of converter with interaction between grid-forming and grid-following control[J/OL]. Automation of Electric Power Systems[2024-09-27]. https://kns.cnki.net/kcms/detail/32.1180.TP.20240920.1148.003.html.
[16] ZHAO J T, HUANG M, ZHA X M. Transient stability analysis of grid-connected VSIs via PLL interaction[C]// 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), November 4-7, 2018, Shenzhen, China.
[17] QORIA T, GRUSON F, COLAS F, et al. Current limiting algorithms and transient stability analysis of grid-forming VSCs[J]. Electric Power Systems Research, 2020, 189: 106726.
[18] 劉雨昕, 彭克, 趙子達(dá), 等. 多虛擬同步發(fā)電機(jī)并聯(lián)系統(tǒng)功率低頻振蕩機(jī)理分析[J]. 電力系統(tǒng)自動(dòng)化, 2024, 48(19): 89-100. LIU Yuxin, PENG Ke, ZHAO Zida, et al. Mechanism analysis of power low-frequency oscillations in parallel system of multiple virtual synchronous generators[J]. Automation of Electric Power Systems, 2024, 48(19): 89-100.
[19] 茍少云, 郭春義. 構(gòu)網(wǎng)型與跟網(wǎng)型混合直驅(qū)風(fēng)電場(chǎng)并網(wǎng)穩(wěn)定域研究[J/OL]. 電力系統(tǒng)自動(dòng)化[2024-09-29]. http://kns.cnki.net/kcms/detail/32.1180.TP.20240927.1515.010.html. GOU Shaoyun, GUO Chunyi. Grid-connection stability domain study on wind farms with hybrid direct-drive grid-forming and grid-following wind turbines[J]. Automation of Electric Power Systems[2024-09-29]. http://kns.cnki.net/kcms/detail/32.1180.TP.20240927.1515.010.html.
[20] 劉欣, 郭志博, 賈焦心, 等. 基于單輸入單輸出等效序阻抗的微網(wǎng)VSG并網(wǎng)穩(wěn)定性分析及虛擬阻抗設(shè)計(jì)[J/OL]. 電工技術(shù)學(xué)報(bào)[2024-05-10]. https://kns.cnki.net/kcms/detail/11.2188.TM.20230419.1615.003.html. LIU Xin, GUO Zhibo, JIA Jiaoxin, et al. Microgrid VSG grid-connection stability analysis and virtual impedance design based on single-input single-output equivalent sequence impedance[J/OL]. Transactions of China Electrotechnical Society[2024-05-10]. https://kns.cnki.net/kcms/detail/11.2188.TM.20230419.1615.003.html.
[21] CHOOPANI M, HOSSEINIAN S H, VAHIDI B. New transient stability and LVRT improvement of multi-VSG grids using the frequency of the center of inertia[J]. IEEE Transactions on Power Systems, 2020, 35(1): 527-538.
[22] SHEN C, SHUAI Z K, SHEN Y, et al. Transient stability and current injection design of paralleled current-controlled VSCs and virtual synchronous generators[J]. IEEE Transactions on Smart Grid, 2021, 12(2): 1118-1134.
[23] 耿華, 何長(zhǎng)軍, 劉浴霜, 等. 新能源電力系統(tǒng)的暫態(tài)同步穩(wěn)定研究綜述[J]. 高電壓技術(shù), 2022, 48(9): 3367-3383. GENG Hua, HE Changjun, LIU Yushuang, et al. Overview on transient synchronization stability of renewable-rich power systems[J]. High Voltage Engineering, 2022, 48(9): 3367-3383.
[24] 楊銀國(guó), 袁梟添, 陸秋瑜, 等. 考慮切換動(dòng)態(tài)的功率同步控制單臺(tái)構(gòu)網(wǎng)型換流器暫態(tài)穩(wěn)定性分析[J]. 電網(wǎng)技術(shù), 2023, 47(10): 4005-4016. YANG Yinguo, YUAN Xiaotian, LU Qiuyu, et al. Transient stability analysis of grid-forming converter with power synchronization control considering switching dynamics[J]. Power System Technology, 2023, 47(10): 4005-4016.
[25] 唐英杰, 查曉明, 田震, 等. 弱電網(wǎng)條件下虛擬同步機(jī)與SVG并聯(lián)系統(tǒng)的暫態(tài)穩(wěn)定性分析[J]. 電網(wǎng)技術(shù), 2022, 46(10): 4020-4034. TANG Yingjie, ZHA Xiaoming, TIAN Zhen, et al. Transient stability analysis of virtual synchronous generator and SVG parallel system under weak grid conditions[J]. Power System Technology, 2022, 46(10): 4020-4034.
[26] ZHANG L D, HARNEFORS L, NEE H P. Power-synchronization control of grid-connected voltage-source converters[J]. IEEE Transactions on Power Systems, 2010, 25(2): 809-820.
[27] 姜鑫, 易皓, 卓放, 等. 基于直流電壓同步的構(gòu)網(wǎng)型變流器低頻振蕩分析與阻尼控制[J]. 電力系統(tǒng)自動(dòng)化, 2024, 48(16): 30-39. JIANG Xin, YI Hao, ZHUO Fang, et al. Low-frequency oscillation analysis and damping control for grid-forming converters based on DC voltage synchronization[J]. Automation of Electric Power Systems, 2024, 48(16): 30-39.
[28] WU H, WANG X F. Design-oriented transient stability analysis of PLL-synchronized voltage-source converters[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 3573-3589.
[29] 張宇, 張琛, 蔡旭, 等. 并網(wǎng)變換器的暫態(tài)同步穩(wěn)定性分析: 穩(wěn)定域估計(jì)與鎮(zhèn)定控制[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2022, 42(21): 7871-7884. ZHANG Yu, ZHANG Chen, CAI Xu, et al. Transient grid-synchronization stability analysis of grid-tied voltage source converters: stability region estimation and stabilization control[J]. Proceedings of the CSEE, 2022, 42(21): 7871-7884.
[30] PAQUETTE A D, DIVAN D M. Virtual impedance current limiting for inverters in microgrids with synchronous generators[C]// 2013 IEEE Energy Conversion Congress and Exposition, September 15-19, 2013, Denver, USA: 1039-1046.
[31] 史蒂芬·H·斯托加茨. 非線性動(dòng)力學(xué)與混沌[M]. 北京: 機(jī)械工業(yè)出版社, 2018. STROGATZ S H. Nonlinear dynamics and chaos[M]. Beijing: China Machine Press, 2018.